Study of speed/position servo-systems - Training module (ref: ERD050000)
Référence : ERD 050 000
Specifications:
The ERD 050000 electromechanical unit is built in a PVC case.
Into this case are located:
▪ 1 mechanical device, including:
▪ 1 DC motor, 24 VDC (characteristics, cf. thereafter)
▪ 1 DC generator, coupled to the motor by OLDHAM joint, enabling the generation of various mechanical loads
▪ 1 graduated disk for displaying the position & behavior of the rotating device
▪ 1 electronic board with high level, power microprocessor, ensuring the system real time control & communication to PC microcomputer ( RS232 serial link or USB)
▪ 1 power electronic board to carry out the motor power interface, as well as the generator interface for the armature current control (simulating various mechanical loads)
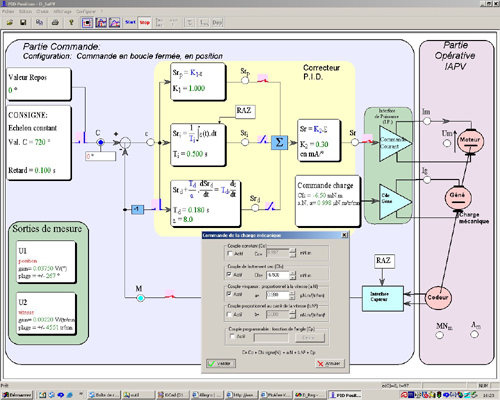
One program under Windows enables the selection of:
▪ The system structure: open/closed loop, speed or position.
▪ The control type & the characteristic values: constant step, ramp, sine, trapezoid, external.
▪ The corrector: P, PI, PD, PID with parameters adjustments (optional: « Z » corrector, 4th order).
▪ The mechanical load profile: constant torque (weighty load), viscous friction (in a.x), fluid friction (in b.x2).
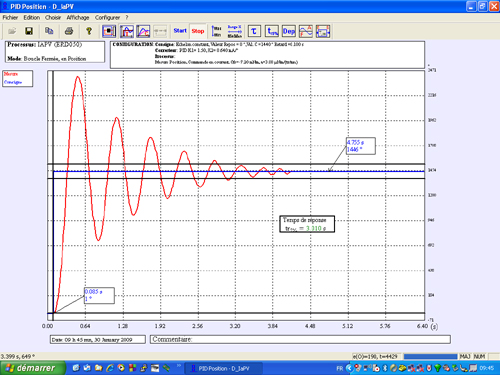
▪ The time response display of one (or several) characteristic magnitude(s): position, speed, acceleration, motor current/voltage, setpoint, gap, corrector output, etc...
▪ The assistance to the measurement of typical values in automatic control: time constant, overshoot, stabilisation at 5%, harmonic calculation, sinusoidal.
|
|


 Mon compte
Mon compte