Electropneumatic robot (Grafcet control) - Training bench (ref: ESD030000)
Référence : ESD 030 000Marque : Didalab / Schneider®
Specifications:
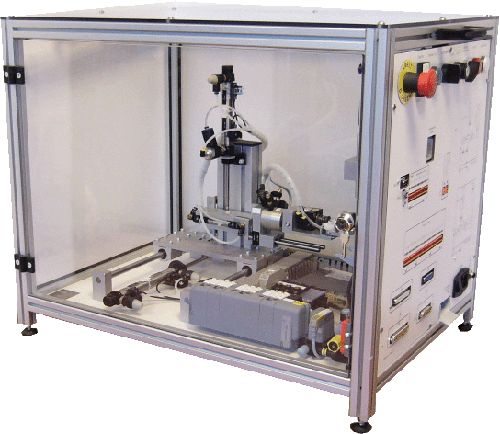
The ESD030B robot unit is the result of a collaboration between Schneider® and Didalab companies, it represents a flexible cell buffering parts.
The unit includes:
▪ 1 electropneumatic robot on 5 axis, inputs and outputs 0/24 VDC (translation, forward/backward, up/down, rotation & gripper opening/closing) totaling 10 different controls (4 bistable & 2 monostable devices) & 11 sensors.
▪ 1 plugging station including 1 bistable control & 3 sensors (piece presence, up & down positions of the cylinder).
▪ 1 inflow store with pieces presence sensor.
▪ 1 outflow ramp.
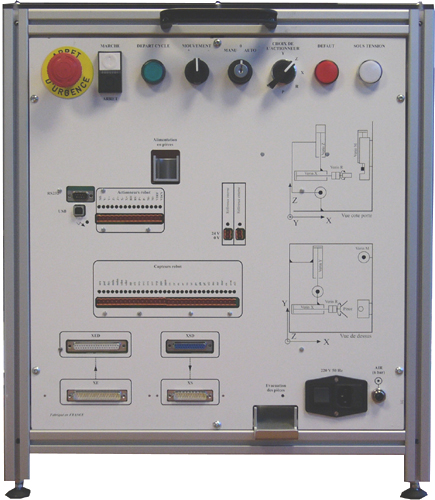
▪ 1 flexible cell control device, including:
→ Outputs: 2 operation modes, 1 emergency stop circuit (emergency button, door opening, pressure drop).
→ Inputs: 1 pressure supply.
▪ 1 system power supply board & 1 air conditioning set.
► It is designed to demonstrate the principles of industrial automation via PC (with GRAFCET interpreter) or API (with DB37 & DB25 connectors or wiring terminal block inputs & outputs such as Zélio, TSX... ).
GRAFCET editor provided in basic version features:
► Editor: enables to draw the Grafcet with the basic tools: step, transition, AND/OR divergence/convergence, macro steps...
► Generator: converts the Grafcet into executable code, checking the syntax & coherence between target & used variables...
► Simulator: executes the Grafcet in simulation, one "click" on the input variable enables the activation of the corresponding transition, the whole graph can be tested before controlling the operating part.
► Interpreter: enables the execution & control following the step-by-step, path or quick mode.
Some characteristics: 256 steps, 256 transitions, 256 * 8-bit memories, macro steps, possibility of several independent Grafcets operating simultaneously. |


 Mon compte
Mon compte